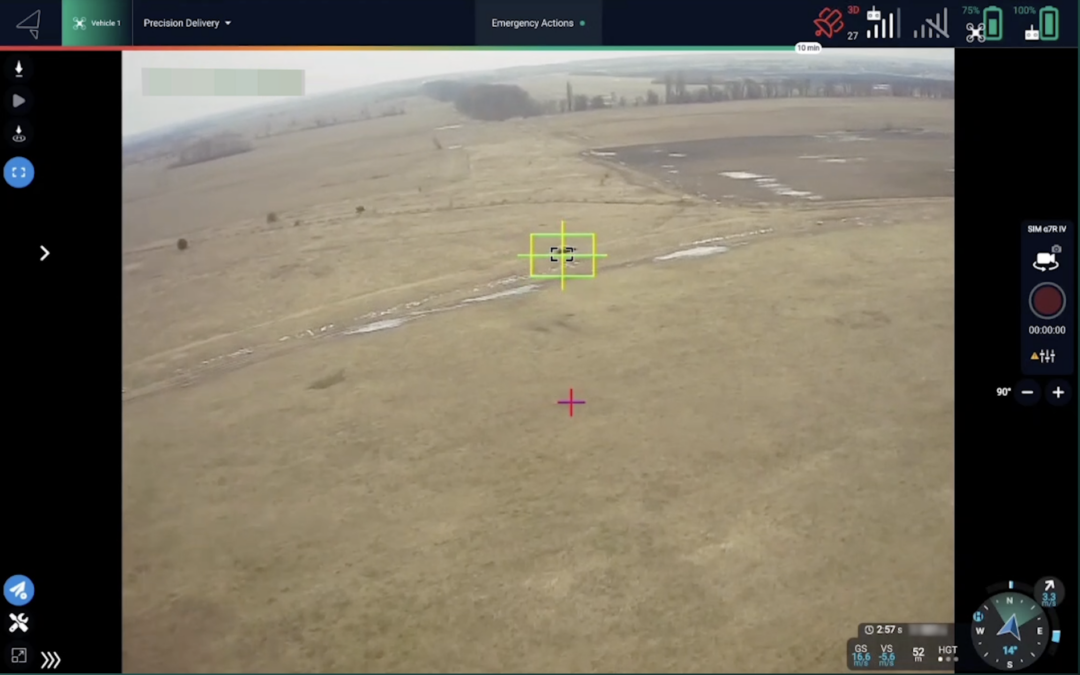
Commercially-available small drone systems provide a highly flexible, intuitive, and affordable way to perform tactical short-range reconnaissance in hard to reach locations. A capability military around the world has been in search of for centuries.
But the U.S. Department of Defense had a small drone problem.
The majority of the popular and affordable off-the-shelf drones are either Chinese owned or manufactured by Chinese entities, leaving only a few more expensive and less capable options for the U.S. Government.
The Blue sUAS project was created to solve this Problem
With the U.S. Government prohibiting the use of foreign (specifically Chinese) made unmanned aircraft systems, the Defence Innovation Unit (DIU) created the Blue sUAS project to build a strong, trusted UAS domestic industry based in the United States.
Recognizing there was also demand throughout the federal government for trusted and secure sUAS, the DIU led the development of systems which are versatile across different users and missions.
This effort offers sUAS that mirror the air vehicle and software architecture of the successful Short Range Reconnaissance (SRR) program but provides alternative ground controller and radio configurations to accommodate a variety of users across the federal government.
What is the Blue sUAS Architecture?
The Blue sUAS Architecture of the Department of Defense (DoD) is an open architecture that leverages the leading open-source software solutions used in the industry for unmanned systems.
It is built on the same insights as the cloud-based JEDI architecture: The DoD needs the most competitive software and the commercial market is building best-in-class systems around open source software.
Why did the DoD use open-source protocols for the Blue sUAS Architecture?
With the DoD already running on open-source software, their preference was for open-source, to move faster and integrate solutions more effectively across Government Departments.
Blue sUAS makes it easier for the U.S. Government to work with small commercial companies and their allies and partners to quickly adopt innovative technologies.
What role does Auterion play in the Blue sUAS Architecture?
As one of the leading contributors and providers of open-source drone software, Auterion was approached to help the U.S. Government accelerate the Blue sUAS program.
Auterion began working with the DIU 18 months ago on the Blue sUAS Architecture to provide QGC and MAVLink for the ground control station to enable standardization on open-source software and prevent vendor lock.
This work is continuing with the incorporation of PX4 into the Blue sUAS architecture, on the air vehicle.
What products does Auterion provide?

The Auterion software platform is an end-to-end drone software solution. It runs with Auterion Enterprise PX4 (AEPX4) on the UAS, with Auterion Mission Control on the ground controller and optionally with the Auterion Suite in your private cloud. It incorporates, very much like Redhat Linux, the best-in-breed open source software.
A single ground controller can control any UAS running Auterion Enterprise PX4 and any UAS communicating via the MAVLink standard.
AEPX4 runs on multiple compute platforms and enables 3rd parties to run AI on the edge.
AEPX4 software controls any type of autonomous system: multicopters, fixed wing, VTOL, rovers. It enables advanced autonomy features on board and allows flexible connectivity options.
The Auterion software platform integrates multiple data links leveraging standard communication protocols and giving flexibility to the end user.
AEPX4 enables payload control and live video streams to the ground controller. Using open industry standards, it supports a variety of payloads.
Github repositories with the Auterion contributions for QGC SRR and PX4
PX4 Github repository: https://github.com/PX4
QGC SRR repository: https://github.com/Auterion/qgroundcontrol/tree/srr-qgc
Role of Auterion in Open source distribution of PX4 and MAVLink
Auterion has been focused on the same mission for over a decade. In 2008 Pixhawk and PX4 software was created by Auterion co-founder Lorenz Meier and is now the most widely used open-source drone autopilot operating system.
Auterion is committed to maintaining the open-source ecosystem and distribution model and supports other companies to use it in their products and services. In 2019 Auterion contributed over half of the code added to PX4.
To learn more about AuterionGS please follow the link and get in touch.
At Auterion our experience is that working with government organizations can be one of the most important drivers for innovation. But with every engagement, thoughtful evaluation of that partnership and its related activities against our code of ethics remains crucial. Learn more about Auterion’s code of ethics.